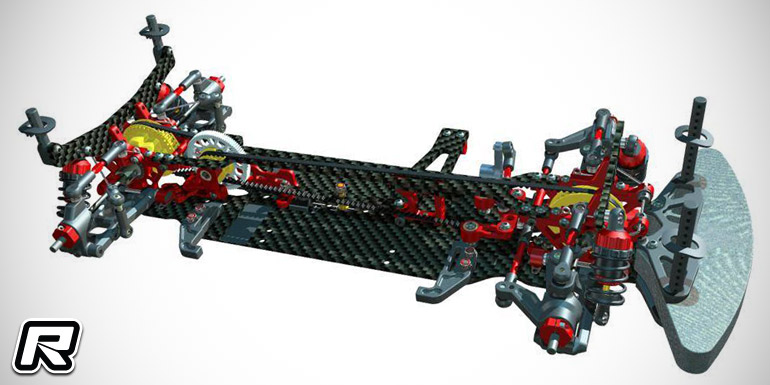
Capricorn TE04 190mm electric touring car kit
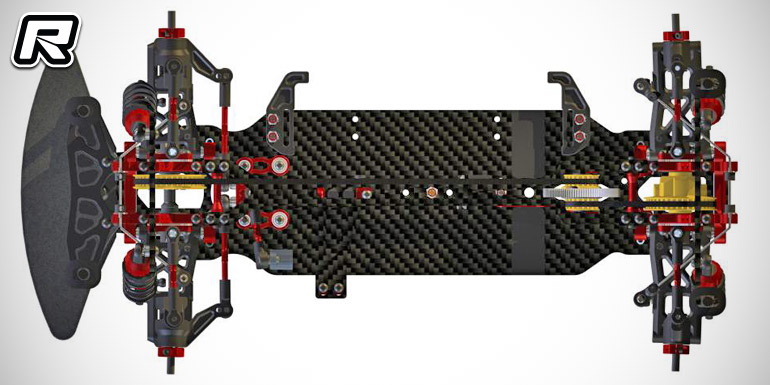
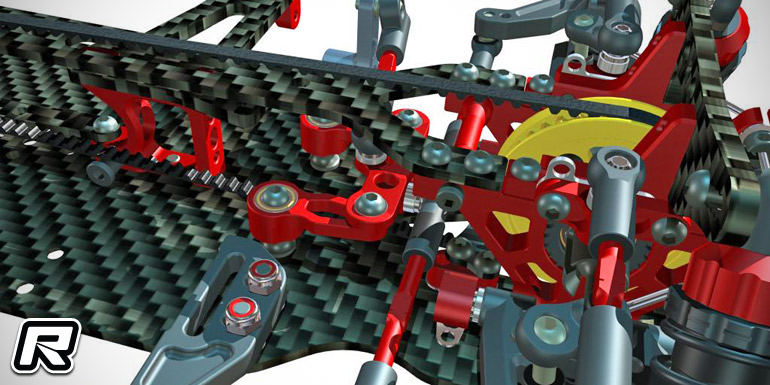
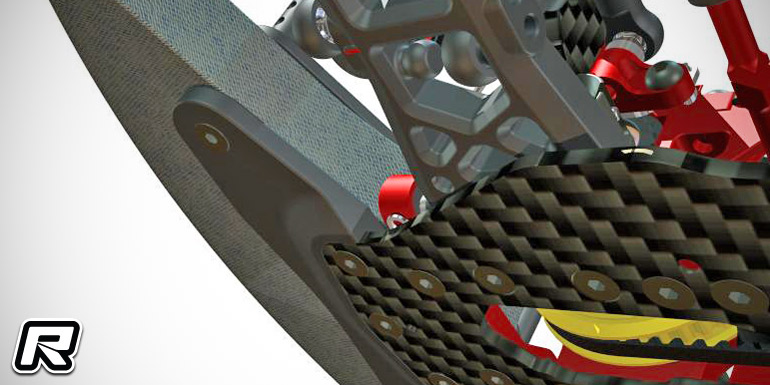
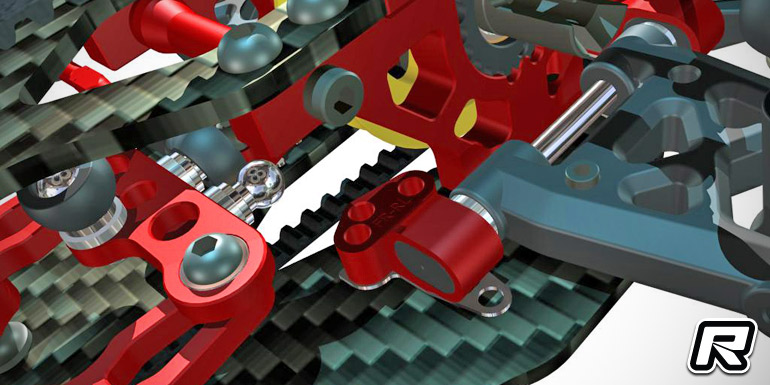
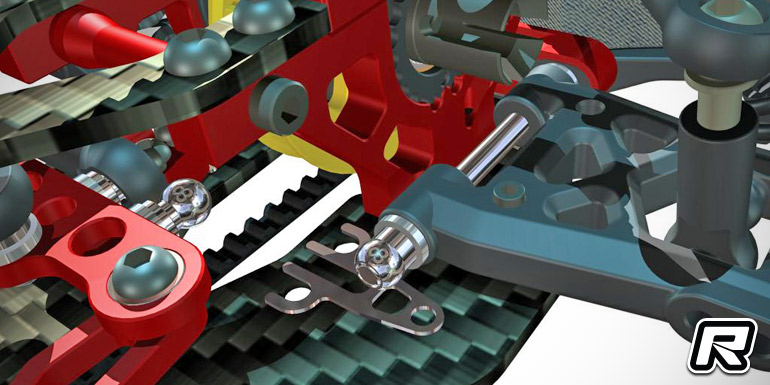
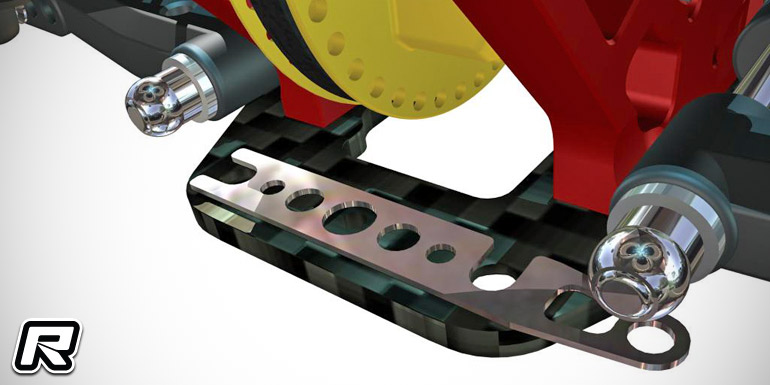
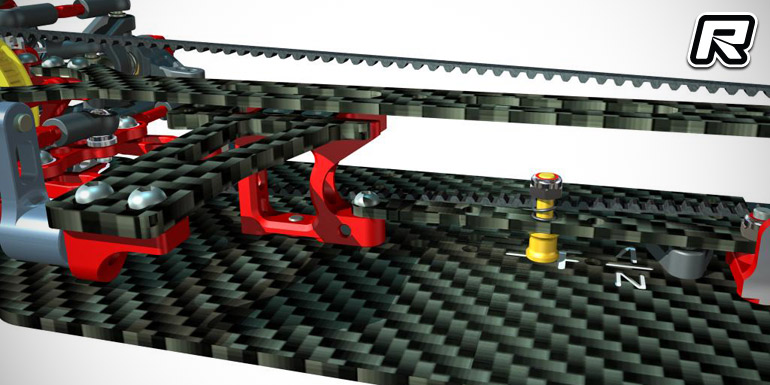
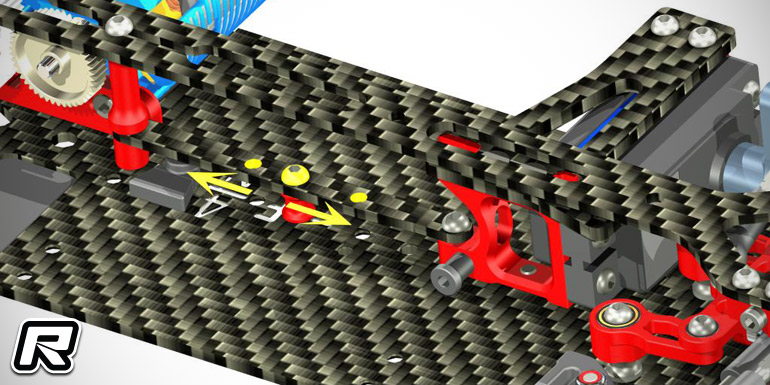
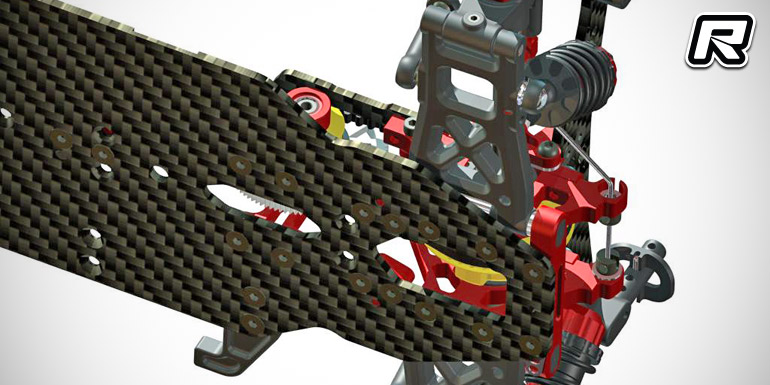
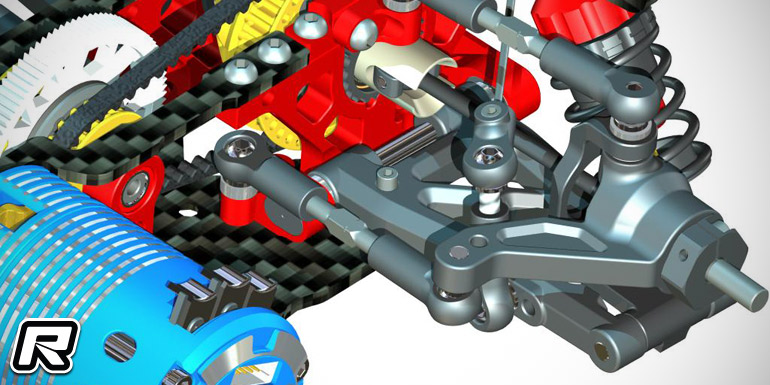
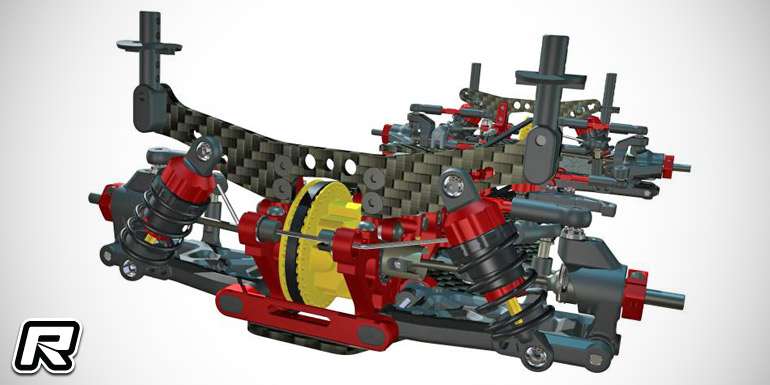
Coming soon from Capricorn is the new TE04 190mm electric touring car kit. Built on the solid foundation of the TE03, the car was designed with the intent of spending less time in the pits and utilising track time to the maximum to find the small details that will help pro and novice racer alike improve their performance on the track. Starting with new suspension mounts and precision quick change roll centre adjustment shims, the new design will allow racers to quickly make precise changes to find that optimal setup. Built into the split suspension mounts are additional holes for a carbon brace to further tune the grip and feel of the TE04. There is also the option of the bulkhead to bulkhead standoff to further tune the chassis stiffness. The new split mounts also offer a further inboard mounting position for the ATS ball stud giving the optional system a more consistent and linear feel from the rear of the car. The new upper bulkheads and camber brackets also are able to be shimmed with new precision quick change shims for finding that optimal camber link length or matching any track width change. With a new concept for the motor mount to servo mount brace, the TE04 uses a unique carbon stiffener with adjustable column position to further tune the stiffness and response from the centre brace allowing the racer to fine tune the feel exactly to their liking or to better keep up with changing track conditions.
Features:
– New carbon chassis for asphalt spec kit
– New aluminium 2.0mm 7075 chassis for U.S. spec kit
– New suspension mounts
– New precision roll centre shims
– New bulkheads
– New upper bulkheads
– New upper camber link brackets
– New precision camber link bracket shims
– New carbon split suspension mount brace
– New bulkhead standoff brace
– New carbon centre stiffener brace with adjustable tensioner
Source: Capricorn [capricornrc.com]